Session 5 - 20 March 2016 - Getting images, BitScope version
Previous sessions
- Session 1 : Powering the board, power use, first (bad) trigging and echoes (06 March 2016)
- Session 2 : Non-controlled pulsing, inverters, better echoes (11 March 2016)
- Session 3 : Getting controlled pulsing, but width not controlled (15 March 2016)
- Session 4 : Width of the pulses is getting controlled =) (19 March 2016)
- Session 4b : Simple data visualisation with BitScope (19 March 2016)
- Session 5 : moving the transducer to get the first image (20 March 2016)
- Session 6 : Getting a clinically usable image (28 March 2016)
- Session 7 : Getting cleaner images - code improvements (3 April 2016)
- Session 8 : Comparing acquisition speeds (3 May 2016)
Today
Goal
Getting an actual image through the BitScope tool.
TL;DR
- Not too bad =)
Setup
Organization
- Overall lab place

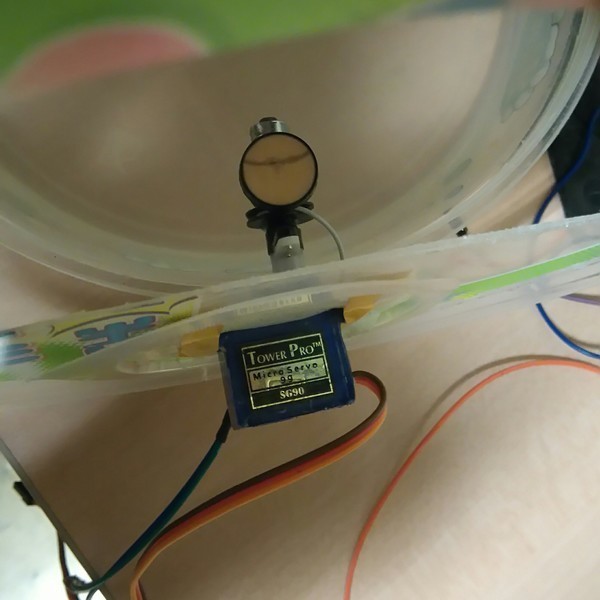
- Detail of the transducer pool, along with the servo, and the servo/transducer cables

- Detail of the transducer head and the rotating device. Yes, it's cracked, but it works!
Hardware
- Murgen 1.0
- Hackaday Trinket Pro
- 5/3.3V alim
- Bitscope micro (BS05)
- A haribo box
- A servo
- A transducer
Remarks
- Same setup as Session 4, and same remarks apply.
- The servo is added
- We are not tapping into the full HighVoltage potential of the board, we could still get a clearer image.
Give me files
- The code lies at
bitscope/acquire_image.pyto acquire a full image - Repeated measurements for a line are at
bitscope/bitscope_data/single_line/*.log - The data for images is at
bitscope/bitscope_data/full_image/*.log - Creating images from the logs is at
bitscope/bitscope_data/full_image/CreateImage.py - Bulking image creations is at
bitscope/bitscope_data/full_image/BatchImage
Discussion and issues
Discussion
- The Acquire_Image.py script is listening on both the Pin11 of the trinket (to get the "Position Pulse" and hence determine where the line is) but also from the TestPoints 2/3 on the murgen board. Therefore, the BitScope needs to listen on both Analog channels, and it imposes that the framerate is divided to 5MHz.
- Getting the first logs using BitScope Python API
- Getting the first raw image
- Getting the first SC:
--length of each image is custom, as the header containing the position changes
--ScanConversion is heavy, so we are proposing a decimation
Issues
- BitScope only trigs on "wide" pulses, so we had to add a 10us pulse from the Arduino so to trig on this signal, not on errors from the Arduino pulser. We got Pin11 do this, still playing with PORTB.
- Python is slow... so if we look at the full image logs, we see that the image takes 2.5s roughly to get 60 lines. Thanks to Python. We are missing a couple of the lines. Thanksfully, we know were each line was shot!
Next steps
- Using the SPI on the TGC, controlled via the Trinket
- How to work only on 1 channel, so that we can get 20Msps with the BitScope instead of the 5Msps ?
- Use a better ScanConversion
- Having TP5/6 work =)