Session 4b - 19 March 2016 - BitScope version
Other sessions
- Session 1 : Powering the board, power use, first (bad) trigging and echoes (06 March 2016)
- Session 2 : Non-controlled pulsing, inverters, better echoes (11 March 2016)
- Session 3 : Getting controlled pulsing, but width not controlled (15 March 2016)
- Session 4 : Width of the pulses is getting controlled =) (19 March 2016)
- Session 4b : Simple data visualisation with BitScope (19 March 2016)
- Session 5 : moving the transducer to get the first image (20 March 2016)
- Session 6 : Getting a clinically usable image (28 March 2016)
- Session 7 : Getting cleaner images - code improvements (3 April 2016)
- Session 8 : Comparing acquisition speeds (3 May 2016)
Today
Goal
Getting images through the BitScope tool.
TL;DR
- Getting images, but more series of points.
Setup
Hardware
- Murgen 1.0
- Hackaday Trinket Pro
- 5/3.3V alim
- Bitscope micro (BS05)
Give me files
- Troubleshooting for the install of bitscope is at bitscope/InstallingBitScope.readme
- The code lies at bitscope/acquire.py
- The data is at bitscope/bitscope_data/*.log
Remarks
- Same setup as Session 4, and same remarks apply.
- Even though
MY_SIZE = 18000,wc -lindicates 12000 items. At 20MHz, that's 600us worth of data, or a full two signals
Discussion and issues
Discussion
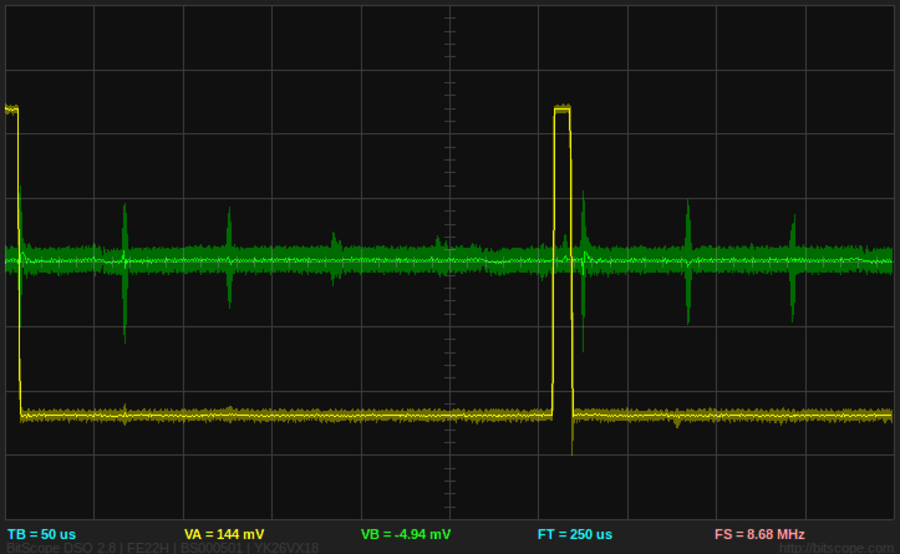
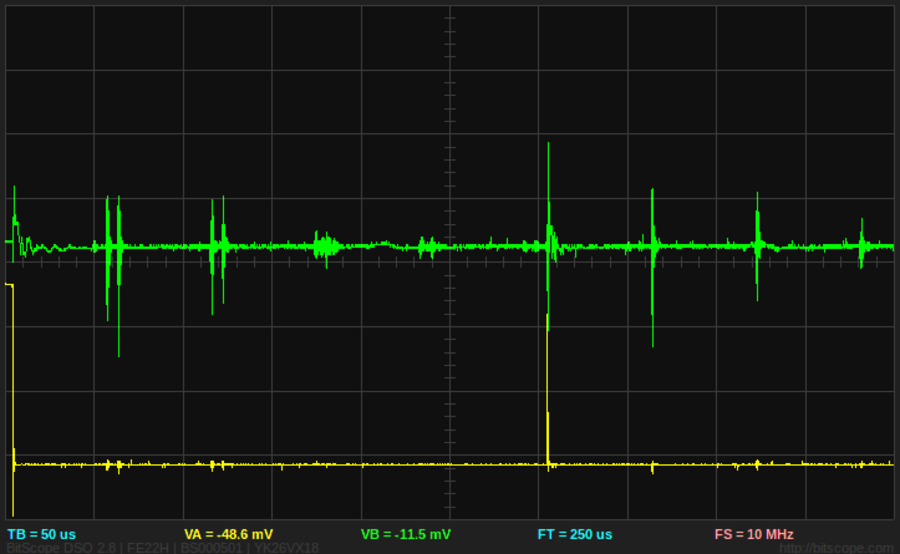
- Getting our first pulses with the BitScope DSO:

- Getting the first logs using BitScope Python API
Issues
- BitScope only trigs on "wide" pulses, so we had to add a 10us pulse from the Arduino so to trig on this signal, not on errors from the Arduino pulser. We got Pin11 do this, still playing with PORTB.
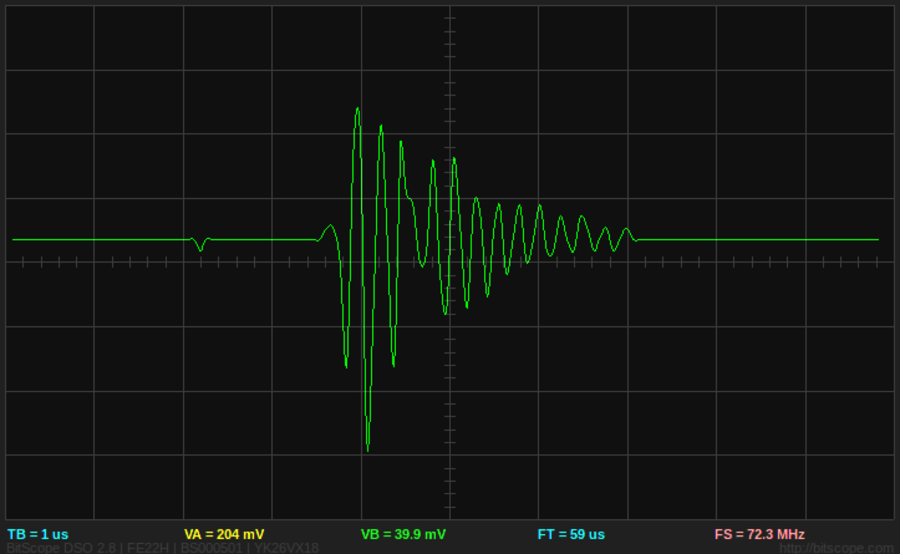
- On the following image, we see on the first line that the first pulse is quite wide because the double echo we see at 60us is characteristic of a wide pulse.
Next steps
- Trigging from Ch A to get Ch B.
- Getting more info in the files: Time of pulse Sampling frequency Number of pulse ...
Images
Getting a pulse
Issues with trigging from a short pulse: it only triggs on "wide" pulses
Solving the issue of the trigger