2016-12-17 -- Lab Log
Aim of the work
- Test the (lower-speed) acquisition using an arduino's ADC (~2Msps), which also streams over wifi, over UDP.
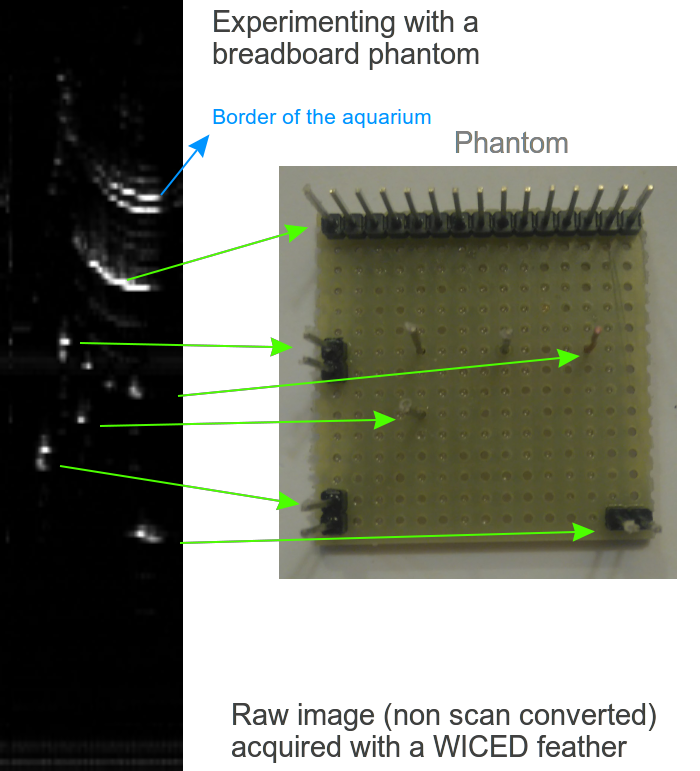
- Build and test a very basic, yet accurate, phantom
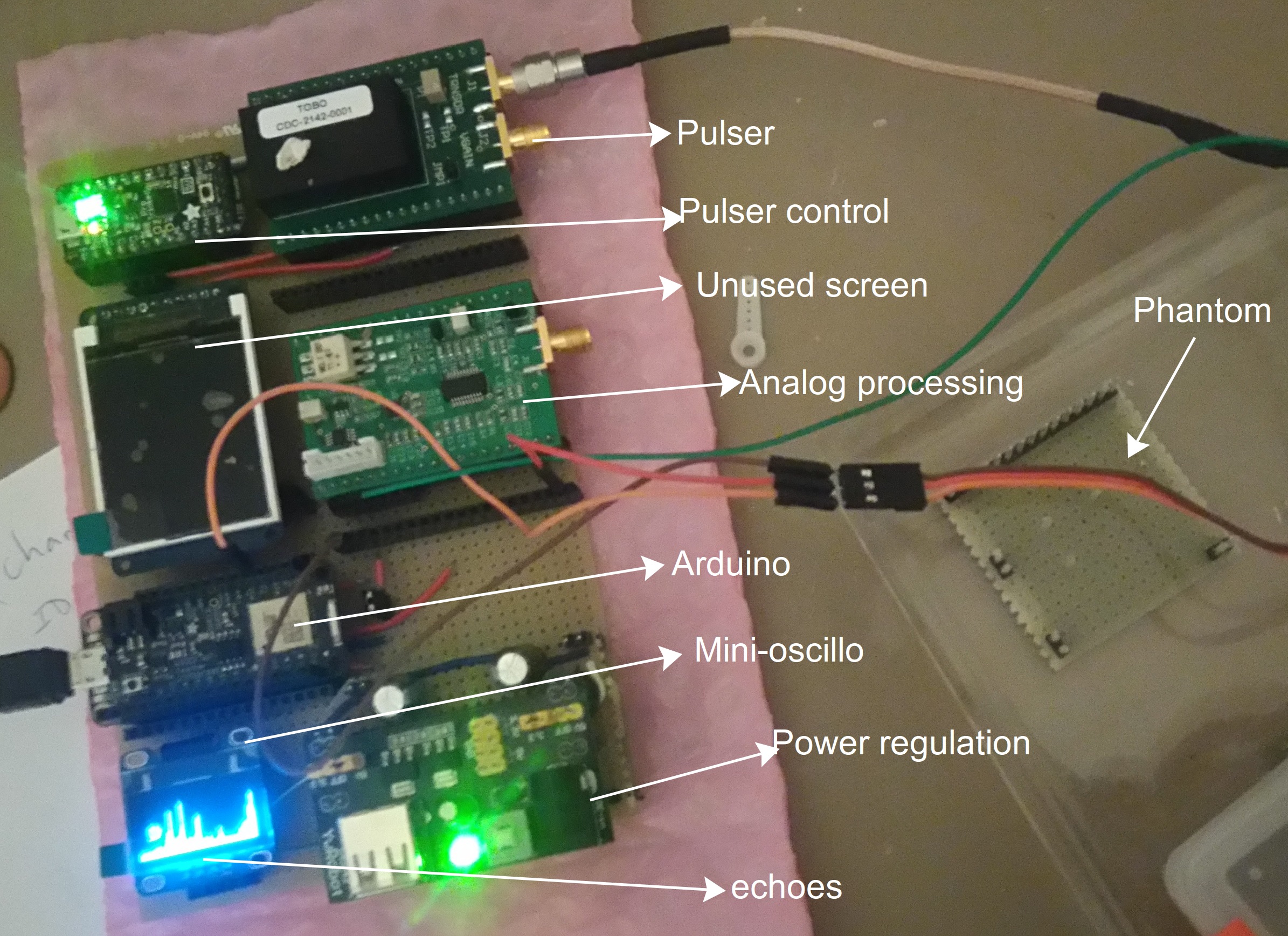
Setup
The classical one. Using the pulser module, analog processing module, and a arduino-like to capture and stream the data. Piezo moved by a servo (module).
Setup:
Phantom

Capturing data
Script used were:
nc -lu 5005 > 20161217-222737.data-- to acquire the raw data streamed by the arduino on port 5005python CreateCSV2.py 20161217-222737.data-- using the CreateCSV2 script to generate proper data using the good format from the raw data file. This was later consolidated in a single image.
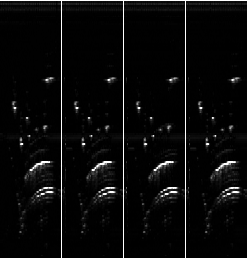
Raw images
Acquisition of 4 images
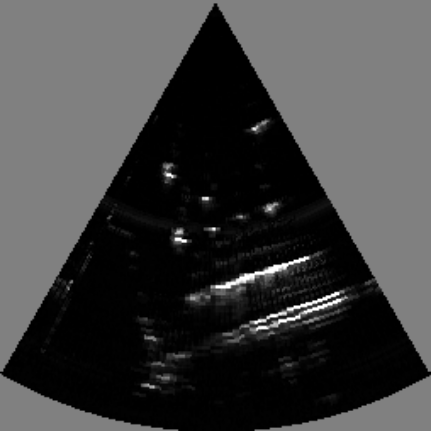
Presented non scan converted
Comparison of raw images to the phantom
Preparing the image
I aggregated the 4 images in one image with the rebuild script which yielded
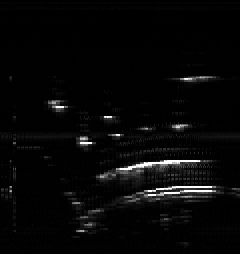
and scan converted it:
Conclusion
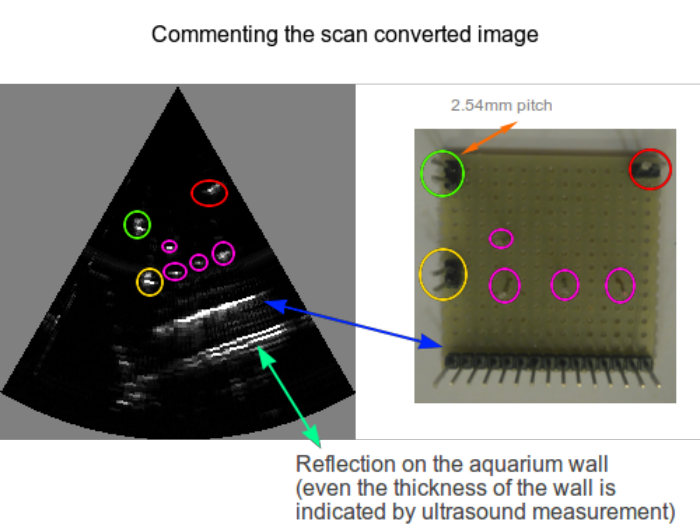
- The acquisition is not too bad, even using an arduino
- The servo may be the limiting element in terms of lateral resolution
- the breadboard pitch is 0.1 inch, 2.54mm. We resolve this.
- There is an issue with repetition echoes: it may be worth waiting more than 300us between shooting lines.
Next steps
- Using a gyro
- Using a RPi0 to connect to the analog processing onboard ADC.