Testing the pulser and acquisition from the RPi
Idea behind it
Proof of concept is being explored
Servo control:
Initiating
FilePath = "20170507.npz"
import matplotlib.pyplot as plt
import numpy as np
from scipy.signal import hilbert, chirp
from scipy import signal, fftpack
from math import *
import math
def find_nearest(array,value):
idx = (np.abs(array-value)).argmin()
return array[idx],idx
Loading the file
Image = np.load(FilePath)["Image"]
Offset = np.load(FilePath)["Offset"]
ScanConverted = np.load(FilePath)["ScanConverted"]
RawImg = np.zeros((np.shape(Image)[0],np.shape(Image)[2]))
for i in range(np.shape(Image)[0]):
for j in range(np.shape(Image)[2]):
RawImg[i][j] = Image[i][0][j]
plt.figure(figsize=(15, 10))
plt.imshow((RawImg[0:90,0:340]).astype(int), cmap='gray')
plt.show()
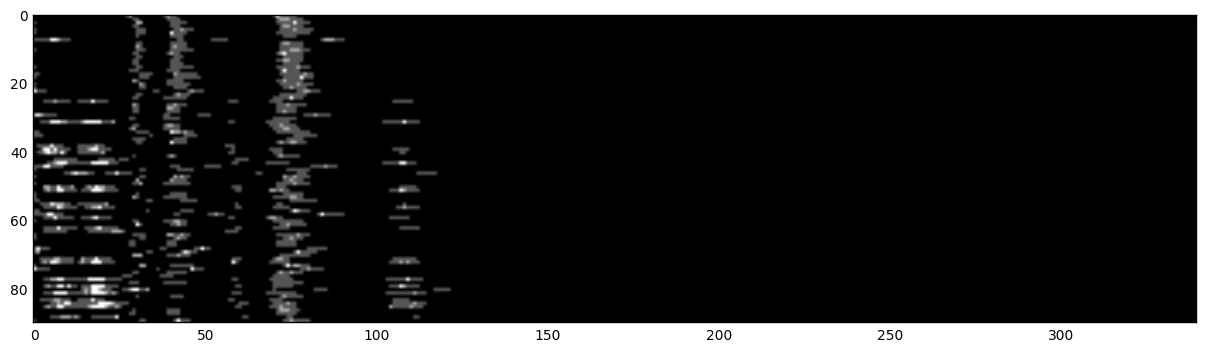
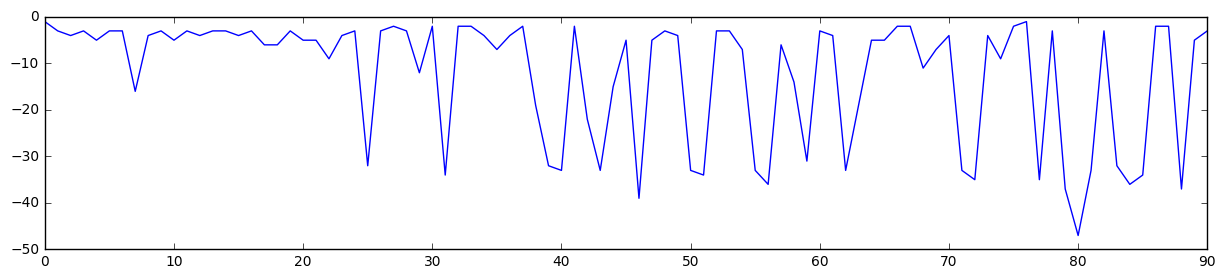
I want to remove the delays
LineNb =np.shape(Image)[0]
Offset = np.zeros(LineNb)
for i in range(np.shape(Image)[0]):
Corr = signal.correlate(RawImg[0][20:350].astype(int),RawImg[i][20:350].astype(int))
Offset[i] = np.argmax(Corr[0:330])-330
#print(Offset[i])
Offset = Offset.astype(int)
plt.figure(figsize=(15, 3))
plt.plot(Offset)
plt.show()
OffsetImg = np.zeros((np.shape(Image)[0],np.shape(Image)[2]))
for i in range(np.shape(Image)[0]):
for j in range(np.shape(Image)[2]-300):
OffsetImg[i][j] = RawImg[i][j-Offset[i]]
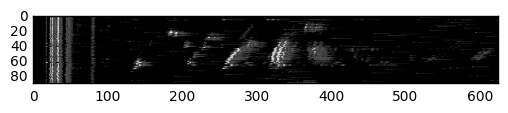
plt.figure(figsize=(15, 10))
plt.imshow(np.sqrt(OffsetImg[0:90,0:3400]), cmap='gray')
plt.show()

Img = np.zeros((91,2500))
OffSetPulser = 70 # offset of 7us
for LineNb in range(np.shape(Img)[0]):
for PointPos in range(np.shape(Img)[1]-OffSetPulser):
Index = find_nearest(Image[LineNb][1], PointPos/10.0)[1]
Img[LineNb][OffSetPulser+PointPos] += OffsetImg[LineNb][Index]
plt.imshow(Img)
plt.show()

DECIMATION = 4
ImgDec = np.zeros((91,2500/DECIMATION))
for LineNb in range(np.shape(ImgDec)[0]):
for PointPos in range(np.shape(ImgDec)[1]):
for i in range(DECIMATION):
ImgDec[LineNb][PointPos] += Img[LineNb][DECIMATION*PointPos+i]
plt.imshow(np.sqrt(ImgDec), cmap='gray')
plt.show()
PointsPerLine = 2500/DECIMATION
NbOfLines = 91
maxAngle = 70.0 # Taken between 3.5 and 7
# Images
step = 1.0*maxAngle/(NbOfLines)
size = (NbOfLines,PointsPerLine)
# Depths
MaxDepth = int(PointsPerLine*math.cos(math.radians(maxAngle/2.0)))
MaxWidth = int(MaxDepth*math.sin(math.radians(maxAngle/2.0)))
X=np.zeros(shape=(size[0],size[1]))
Y=np.zeros(shape=(size[0],size[1]))
for i in range(size[0]):
for j in range(size[1]):
X[i][j] = j*math.cos(math.radians(step*i-maxAngle/2))
Y[i][j] = MaxWidth+j*math.sin(math.radians(step*(i)-maxAngle/2)) # same
sizeSC = (size[1],2*MaxWidth)
ScanConverted=np.zeros(shape=(size[1],2*MaxWidth))
ScanConverted = ScanConverted + 4
SINAngle = math.sin(math.radians(maxAngle/2.0))
for i in range(size[1]):
if (i<MaxDepth):
sweep = int(i*SINAngle)+1
for j in range((MaxWidth - sweep),(MaxWidth + sweep)):
D = (X-i)**2 + (Y-j)**2
resul = np.unravel_index(D.argmin(), D.shape)
ScanConverted[i][j] = np.sqrt(ImgDec[resul[0]][resul[1]])
else:
for j in range(MaxWidth*2):
if ( (i**2) + (j-(MaxWidth))**2 ) < ((PointsPerLine)**2 ):
D = (X-i)**2 + (Y-j)**2
resul = np.unravel_index(D.argmin(), D.shape)
ScanConverted[i][j] = ImgDec[resul[0]][resul[1]]
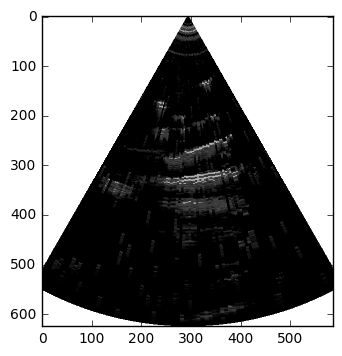
plt.imshow((ScanConverted), cmap='gray')
plt.show()
625 293
(625, 586)
0%
4%
9%
14%
19%
24%
29%
34%
39%
44%
49%
54%
59%
64%
69%
74%
79%
84%
89%
94%
99%
np.savez_compressed(FilePath,Image=Image,Offset=Offset,ScanConverted=ScanConverted)
plt.figure(figsize=(15, 10))
plt.imshow((ScanConverted), cmap='gray')
plt.show()

Conclusion
- The pulser works.. but some delays don't work
- ADC seems to work nicely
- Crappy stuff is the servo..